
भाषा


























-
विद्युत -यांत्रिक सार्वभौमिक परीक्षण मशीन
- हाइड्रोलिक सार्वभौमिक परीक्षण मशीन
- स्वचालित परीक्षण प्रणालियाँ
-
क्षैतिज तन्य परीक्षण मशीन
-
इलास्टोमेरिक असर परीक्षण मशीन
-
संपीड़न परीक्षण मशीन
-
उच्च तापमान रेंगना परीक्षण मशीन
- प्रभाव परीक्षण प्रणाली
-
गतिशील परीक्षण तंत्र
-
मरोड़ परीक्षण मशीन
-
झुकने परीक्षण मशीन
- विशेष परीक्षण मशीन
- गैर-धातु परीक्षण मशीन
- कठोरता परीक्षक
- धातु -पत्रकारिता उपस्कर
-
माइक्रोस्कोप
डबल स्टेशन मरोड़ परीक्षण मशीन
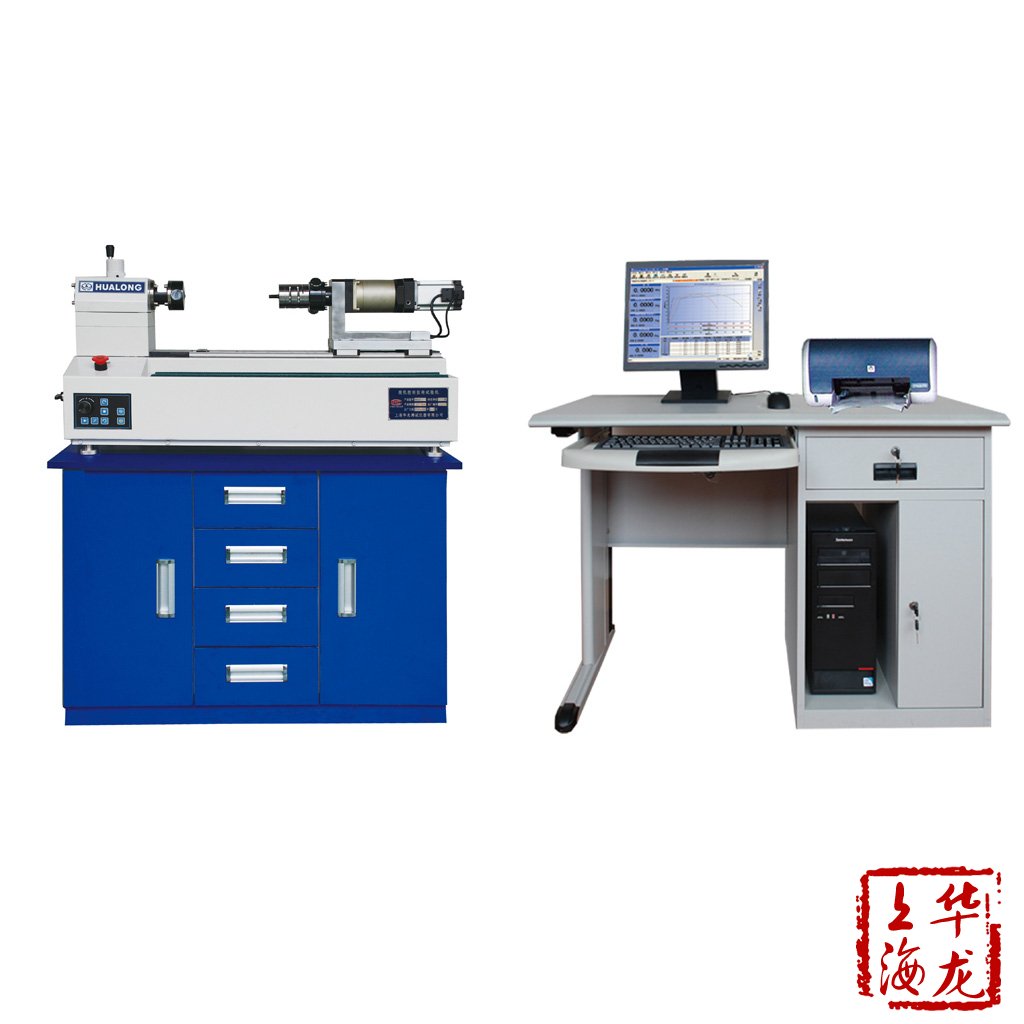
मुख्य मशीन एक आधार, एक वाहन बॉडी (रिडक्शन मशीन बॉडी और लोड सेंसर बॉडी) और एक माइक्रो कंप्यूटर मापने वाली प्रणाली से बना है। वाहन शरीर पर लगे लोडिंग तंत्र फ्रेम रेल पर स्वतंत्र रूप से स्लाइड कर सकते हैं। लोडिंग तंत्र नमूने पर टोक़ लगाने के लिए एक पैनासोनिक सर्वो मोटर द्वारा संचालित होता है। टोक़ मूल्य और नमूने के कसने वाले लोड को सेंसर द्वारा मापा जाता है, और मरोड़ कोण फोटोइलेक्ट्रिक रूप से एन्कोडेड है। डिटेक्टर का पता चला सिग्नल का पता लगाता है और नमूना के मरोड़ सूचकांक और वक्र के ड्राइंग को पूरा करने के लिए इसे प्रसंस्करण प्रणाली में प्रसारित करता है।
टोक़, मरोड़ कोण और परीक्षण वक्र के गतिशील प्रदर्शन और नियंत्रण कार्यों के साथ।
यह एक मोड़ कोण के साथ एक मनमानी सेटिंग है, सेट मान तक पहुंचता है और स्वचालित रूप से फ़ंक्शन को बनाए रखता है।
टोक़ मान मनमाने ढंग से सेट के साथ, सेट मान पहुंच जाता है और फ़ंक्शन स्वचालित रूप से बनाए रखा जाता है।
इसमें लोड को कसने के लिए कोई सेटिंग है, सेट मान तक पहुंचता है और स्वचालित रूप से फ़ंक्शन को बनाए रखता है।
अधिकतम टोक़ मान और न्यूनतम टोक़ होल्ड फ़ंक्शन है।
एक तनाव-टॉर्क मैप और एक ट्विस्ट एंगल-टोर्क मानचित्र उत्पन्न करें।
भाग लेने की शक्ति मूल्य की गणना करने के लिए बोल्ट व्यास को थ्रेडेड कनेक्शन जोड़ी में इनपुट किया जा सकता है, और यांत्रिक प्रदर्शन सूचकांक स्वचालित रूप से प्राप्त किया जा सकता है और एक पूर्ण परीक्षण रिपोर्ट मुद्रित की जा सकती है।
इसमें परीक्षण के परिणामों को संग्रहीत करने का कार्य है, और परीक्षण के परिणामों तक पहुंच और पढ़ सकते हैं, और आंशिक वृद्धि और डेटा पुन: संपादन सहित डेटा और घटता को फिर से जोड़ सकते हैं।
नमूना स्थितियों को स्वचालित रूप से संग्रहीत किया जा सकता है, स्वचालित रूप से याद किया जाता है, या रीसेट किया जा सकता है।
अधिभार संरक्षण के साथ
टोक़, मरोड़ कोण और परीक्षण वक्र के गतिशील प्रदर्शन और नियंत्रण कार्यों के साथ।
यह एक मोड़ कोण के साथ एक मनमानी सेटिंग है, सेट मान तक पहुंचता है और स्वचालित रूप से फ़ंक्शन को बनाए रखता है।
टोक़ मान मनमाने ढंग से सेट के साथ, सेट मान पहुंच जाता है और फ़ंक्शन स्वचालित रूप से बनाए रखा जाता है।
इसमें लोड को कसने के लिए कोई सेटिंग है, सेट मान तक पहुंचता है और स्वचालित रूप से फ़ंक्शन को बनाए रखता है।
अधिकतम टोक़ मान और न्यूनतम टोक़ होल्ड फ़ंक्शन है।
एक तनाव-टॉर्क मैप और एक ट्विस्ट एंगल-टोर्क मानचित्र उत्पन्न करें।
भाग लेने की शक्ति मूल्य की गणना करने के लिए बोल्ट व्यास को थ्रेडेड कनेक्शन जोड़ी में इनपुट किया जा सकता है, और यांत्रिक प्रदर्शन सूचकांक स्वचालित रूप से प्राप्त किया जा सकता है और एक पूर्ण परीक्षण रिपोर्ट मुद्रित की जा सकती है।
इसमें परीक्षण के परिणामों को संग्रहीत करने का कार्य है, और परीक्षण के परिणामों तक पहुंच और पढ़ सकते हैं, और आंशिक वृद्धि और डेटा पुन: संपादन सहित डेटा और घटता को फिर से जोड़ सकते हैं।
नमूना स्थितियों को स्वचालित रूप से संग्रहीत किया जा सकता है, स्वचालित रूप से याद किया जाता है, या रीसेट किया जा सकता है।
अधिभार संरक्षण के साथ
एक संदेश छोड़ें
आप मुझे ईमेल के माध्यम से भी संपर्क कर सकते हैं। मेरा ई - मेंल पता है info@shhualong.com
अनुशंसित उत्पाद

LWC-300/500/1000/2000 इलेक्ट्रो-हाइड्रोलिक सर्वो तीन-सिलेंडर बेंडिंग परीक्षण मशीन - LWC श्रृंखला

WCJ-20000/50000/100000 पूरी तरह से स्वचालित धातु ड्रॉप वजन प्रभाव परीक्षण मशीन (DWTT) - WCJ श्रृंखला

रोबोटिक पूर्णतः स्वचालित पेंडुलम प्रभाव परीक्षण मशीन - सीबीडी-डीआर श्रृंखला
पूरी तरह से स्वचालित रोबोटिक इलाज और संपीड़न शक्ति परीक्षण प्रणाली - WHY-G श्रृंखला
सहायता चाहिए या कोई प्रश्न?
Hualong परीक्षण के माध्यम से आपकी कंपनी के लाभ में मदद करने के बारे में अधिक जानकारी के लिए, कृपया बटन पर क्लिक करें।FRIEND LINK:
हमसे संपर्क करें
नंबर 389 चुनाहोंग रोड, पुडोंग न्यू एरिया, शंघाई 201202, चीन
Tel: +86 17821945087
Online Service: 7*24h






© 2018 HUALONG All rights reserved. SiteMap
