
भाषा


























-
विद्युत -यांत्रिक सार्वभौमिक परीक्षण मशीन
- हाइड्रोलिक सार्वभौमिक परीक्षण मशीन
- स्वचालित परीक्षण प्रणालियाँ
-
क्षैतिज तन्य परीक्षण मशीन
-
इलास्टोमेरिक असर परीक्षण मशीन
-
संपीड़न परीक्षण मशीन
-
उच्च तापमान रेंगना परीक्षण मशीन
- प्रभाव परीक्षण प्रणाली
-
गतिशील परीक्षण तंत्र
-
मरोड़ परीक्षण मशीन
-
झुकने परीक्षण मशीन
- विशेष परीक्षण मशीन
- गैर-धातु परीक्षण मशीन
- कठोरता परीक्षक
- धातु -पत्रकारिता उपस्कर
-
माइक्रोस्कोप
Ndt पेंडुलम प्रभाव परीक्षण मशीन

उपकरण में एक इलेक्ट्रॉनिक रूप से नियंत्रित ऑपरेटिंग सिस्टम, एक कम तापमान नियंत्रण प्रणाली, एक फीडिंग डिवाइस और एक सेंटरिंग डिवाइस, एक होस्ट सिस्टम, एक एंटी-सेकेंडरी स्ट्राइक डिवाइस और एक सुरक्षा सुरक्षा प्रणाली शामिल हैं।
1.2.1.1। इलेक्ट्रॉनिक रूप से नियंत्रित ऑपरेटिंग सिस्टम:
मैन-मशीन इंटरफ़ेस टच स्क्रीन ऑपरेशन मोड को अपनाना, पहले नमूना प्रकार के अनुसार टच स्क्रीन पर संबंधित नमूना प्रकार का चयन करें, और विभिन्न परीक्षण मापदंडों को सेट करें, जैसे: हैमर वेट, सेट ड्रॉप ऊंचाई, ऊर्जा, नमूना संख्या और इस तरह। और इसे टच स्क्रीन पर दर्ज करें, या सीधे आवश्यक प्रभाव ऊर्जा को इनपुट करें। तैयारी बटन दबाएं, इस समय, परीक्षण मशीन स्वचालित रूप से हथौड़ा को सेट ऊंचाई तक बढ़ाएगी। ऑपरेटर उस नमूने को ले जाएगा जो इनक्यूबेटर से निरंतर तापमान की आवश्यकता तक पहुंच गया है, इसे नमूना फीडिंग डिवाइस में डाल दिया है, और नमूना को एनविल टेबल में धकेल दिया है। ऊपरी, अंत स्थिति, स्वचालित केंद्र, सुरक्षात्मक दरवाजा बंद करना, ड्रॉप हैमर बटन शुरू करना, हैमर बॉडी स्वचालित रूप से गिरता है, सिंगल पीस इम्पैक्ट टेस्ट को पूरा करता है। परीक्षण डेटा डिस्प्ले विंडो। प्रभाव पूरा होने के बाद, तैयारी बटन को फिर से दबाएं, और लॉक हथौड़ा तंत्र स्वचालित रूप से हथौड़ा को पकड़ लेगा और हथौड़ा उठाएगा। इसी समय, नमूना वितरण उपकरण को प्रारंभिक डिवाइस पर वापस खींचा जा सकता है और दूसरे प्रभाव परीक्षण का इंतजार किया जा सकता है। स्वचालित सिस्टम विफल होने पर मैनुअल मैनुअल ऑपरेशन किया जा सकता है। जब उपकरण का निरीक्षण किया जाता है, तो रखरखाव कर्मी प्रत्येक इकाई के कार्यों पर चरण-दर-चरण संचालन कर सकते हैं।
1.2.1.2। कम तापमान नियंत्रण प्रणाली (इस निविदा में कम तापमान प्रणाली का उल्लेख नहीं है)
तापमान नियंत्रण सीमा: कमरे का तापमान ~ -80 ° C, तापमान नियंत्रण सटीकता ° 0.5 ° C, तापमान ढाल ° 2 ° C. सबसे लंबा हीटिंग समय: कमरे का तापमान ~ -100 ° C <2 घंटे। डिवाइस एक साथ 6-8 पी -2 नमूने रख सकता है। नमूने में एक शीतलन माध्यम की उपस्थिति में तापमान एकरूपता सुनिश्चित करने के लिए एक सरगर्मी कार्य है। तापमान परिवर्तन सीधे तापमान नियंत्रण डिजिटल प्रदर्शन पर देखा गया था। प्रशीतन प्रणाली एक दो-चरण के डुप्लेक्स कूलिंग और एक दोहरी पंप स्टार्ट का उपयोग करती है। इसमें एक निरंतर तापमान समय त्वरित कार्य होता है, और जब यह सेट निरंतर तापमान समय तक पहुंचता है, तो एक चरम ध्वनि होगी।
1.2.1.3। फीडिंग डिवाइस और सेंटरिंग डिवाइस
मैन्युअल रूप से क्रायोस्टैट से मानक नमूना निकालें और इसे फीडिंग डिवाइस में डाल दें। डिवाइस क्रैंक-एंड-रॉड मैकेनिज्म को अपनाता है, और नमूना को प्रभावित करने वाले एनविल को भेजने के लिए हैंड्रिल को धक्का देता है। यह स्वचालित रूप से केंद्रित है और उन्हें फीडिंग डिवाइस लेने की आवश्यकता नहीं है। प्रभाव पूरा होने के बाद, फीडिंग डिवाइस और अपशिष्ट पदार्थ को दूसरे नमूने को रखने के लिए प्रतीक्षा करने के लिए प्रारंभिक स्थिति में वापस खींच लिया जाता है। पी -2, पी -3, पी -4 नमूनों के लिए उपयुक्त। सेंटरिंग डिवाइस को एनविल पर लगाया जाता है और नमूने का अंत त्रुटि समायोजन के लिए तैनात किया जाता है।
1.2.1.4। होस्ट सिस्टम
मुख्य मशीन एक ट्रांसमिशन मैकेनिज्म, एक हैमर बॉडी कंपोनेंट, एक लिफ्टिंग मैकेनिज्म, एक हैमर ट्रैकिंग डिवाइस, एक गाइड रेल, बेस का फ्रेम और इस तरह से बना है।
एक। संचरण तंत्र
यह एक जापानी शिमा ब्रांड गियर वाली मोटर से सुसज्जित है और इसमें पावर-ऑफ ब्रेक है। यदि मोटर बंद हो जाती है और हथौड़ा के बढ़ने या गिरने के दौरान अचानक बिजली की विफलता के दौरान संपूर्ण ट्रांसमिशन सिस्टम रुक जाता है, तो यह हथौड़े को फिसलने और दुर्घटना से रोक सकता है।
बी। हथौड़ा भाग
हथौड़ा शरीर कास्ट स्टील के टुकड़े की समग्र संरचना को अपनाता है, कठोरता अच्छी है, पंच और हथौड़ा शरीर संयुक्त हैं, और उच्च गुणवत्ता वाले मिश्र धातु स्टील सामग्री का उपयोग किया जाता है, कठोरता HRC58-62 तक पहुंचती है, और पंच के वक्रता त्रिज्या R25 तक पहुंचती है। हैमर बॉडी का ऊपरी हिस्सा एक हुक सेल्फ-लॉकिंग स्ट्रक्चर के साथ प्रदान किया जाता है।
सी। उठाना तंत्र
स्प्रोकेट चेन ट्रांसमिशन मोड को अपनाते हुए, उठाने की गति 1.1m/मिनट है, धीरे -धीरे लॉक हथौड़ा को कम करना और हथौड़ा उठाना। सीमा नियंत्रण स्विच स्थापित किया गया है और स्वचालित रूप से बंद कर दिया गया है।
डी। हथौड़ा ट्रैकिंग डिवाइस उठाना
हैमर ट्रैकिंग डिवाइस को कम करने के माध्यम से, हथौड़ा शरीर को हथौड़ा शरीर के संपर्क के बाद स्वचालित रूप से बंद कर दिया जाता है, और संयुक्त शरीर को धीरे -धीरे उठाने वाले तंत्र की कार्रवाई के तहत उठाया जाता है। सेट ऊंचाई तक पहुंचने के बाद, सीमा घटक जल्दी से ट्रांसमिशन सिस्टम को घूर्णन से रोकने के लिए एक संकेत प्रसारित करता है और हथौड़ा सेट ऊंचाई पर रुक जाता है। जब प्रभाव कमांड प्राप्त होता है, तो लॉक हैमर डिवाइस जल्दी से हथौड़ा शरीर जारी करता है और गाइड रेल के साथ स्वतंत्र रूप से चलता है। प्रभाव परीक्षण पूरा करें। लॉक हैमर और रिलीज़ मैकेनिज्म में एक सेल्फ-लॉकिंग डिवाइस होता है, और हुक-एंड-ड्रॉप फेनोमेनन अचानक बिजली की विफलता की स्थिति में नहीं होता है। सुरक्षित और विश्वसनीय।
ई। मार्गदर्शक रेल
यह दो × 54 × 12 निर्बाध स्टील ट्यूब और फिर क्रोम-प्लेटेड के साथ एक चिकनी सतह में संसाधित किया जाता है।
एफ। फ्रेम फ्रेम
आधार ZG45 कास्ट स्टील सामग्री से बना है। स्तंभ चार × 83 × 12 निर्बाध स्टील ट्यूबों को अपनाता है, और शीर्ष प्लेट कठोरता और शक्ति आवश्यकताओं को सुनिश्चित करने के लिए मोटी स्टील प्लेट से बना है।
1.2.1.5। विकलांग-विरोधी हड़ताल युक्ति
दो कार्यशील टेबल सतहों को क्रमशः हथौड़ा शरीर लैंडिंग स्थिति के आधार पर रखा गया है, और एक पुश-प्रकार इलेक्ट्रोमैग्नेट लीवर तंत्र को टेबल की सतह पर लगाया जाता है। जब हथौड़ा ब्लेड नमूना को हिट करता है, तो फोटोइलेक्ट्रिक सिग्नल को तुरंत लीवर को धक्का देने के लिए इलेक्ट्रोमैग्नेट में प्रेषित किया जाता है। एंटी-सेकंडरी स्ट्राइक ब्लॉक को हथौड़ा की खाई में धकेलते हुए, जो ऊपर की ओर रिबाउंड करता है, ड्रॉप हैमर को ऊपर उठाता है, और हथौड़ा ब्लेड को दो बार नमूने पर गिरने का कारण नहीं बनता है, प्रभावी रूप से "माध्यमिक" हड़ताल को रोकता है।
1.2.1.6। सुरक्षा सुरक्षा युक्ति
यह 1 मीटर हाई स्टील मेष सुरक्षा उपकरण को अपनाता है और दरवाजा बंद करने के लिए इलेक्ट्रिक कंट्रोल डिवाइस से लैस है। सुरक्षात्मक दरवाजा बंद नहीं है, और ऑपरेटिंग सिस्टम हमेशा बंद रहता है और इसे शुरू नहीं किया जा सकता है।
1.2.1.7। आंकड़ा अधिग्रहण तंत्र
मोटर आउटपुट शाफ्ट को दक्षिण कोरिया से आयातित एक रोटरी एनकोडर के साथ सहवास किया जाता है। इसकी उच्च परिशुद्धता और 0.1O का संकल्प उठाने की स्थिति की सटीकता को सटीक रूप से नियंत्रित कर सकता है।
1.2.1.1। इलेक्ट्रॉनिक रूप से नियंत्रित ऑपरेटिंग सिस्टम:
मैन-मशीन इंटरफ़ेस टच स्क्रीन ऑपरेशन मोड को अपनाना, पहले नमूना प्रकार के अनुसार टच स्क्रीन पर संबंधित नमूना प्रकार का चयन करें, और विभिन्न परीक्षण मापदंडों को सेट करें, जैसे: हैमर वेट, सेट ड्रॉप ऊंचाई, ऊर्जा, नमूना संख्या और इस तरह। और इसे टच स्क्रीन पर दर्ज करें, या सीधे आवश्यक प्रभाव ऊर्जा को इनपुट करें। तैयारी बटन दबाएं, इस समय, परीक्षण मशीन स्वचालित रूप से हथौड़ा को सेट ऊंचाई तक बढ़ाएगी। ऑपरेटर उस नमूने को ले जाएगा जो इनक्यूबेटर से निरंतर तापमान की आवश्यकता तक पहुंच गया है, इसे नमूना फीडिंग डिवाइस में डाल दिया है, और नमूना को एनविल टेबल में धकेल दिया है। ऊपरी, अंत स्थिति, स्वचालित केंद्र, सुरक्षात्मक दरवाजा बंद करना, ड्रॉप हैमर बटन शुरू करना, हैमर बॉडी स्वचालित रूप से गिरता है, सिंगल पीस इम्पैक्ट टेस्ट को पूरा करता है। परीक्षण डेटा डिस्प्ले विंडो। प्रभाव पूरा होने के बाद, तैयारी बटन को फिर से दबाएं, और लॉक हथौड़ा तंत्र स्वचालित रूप से हथौड़ा को पकड़ लेगा और हथौड़ा उठाएगा। इसी समय, नमूना वितरण उपकरण को प्रारंभिक डिवाइस पर वापस खींचा जा सकता है और दूसरे प्रभाव परीक्षण का इंतजार किया जा सकता है। स्वचालित सिस्टम विफल होने पर मैनुअल मैनुअल ऑपरेशन किया जा सकता है। जब उपकरण का निरीक्षण किया जाता है, तो रखरखाव कर्मी प्रत्येक इकाई के कार्यों पर चरण-दर-चरण संचालन कर सकते हैं।
1.2.1.2। कम तापमान नियंत्रण प्रणाली (इस निविदा में कम तापमान प्रणाली का उल्लेख नहीं है)
तापमान नियंत्रण सीमा: कमरे का तापमान ~ -80 ° C, तापमान नियंत्रण सटीकता ° 0.5 ° C, तापमान ढाल ° 2 ° C. सबसे लंबा हीटिंग समय: कमरे का तापमान ~ -100 ° C <2 घंटे। डिवाइस एक साथ 6-8 पी -2 नमूने रख सकता है। नमूने में एक शीतलन माध्यम की उपस्थिति में तापमान एकरूपता सुनिश्चित करने के लिए एक सरगर्मी कार्य है। तापमान परिवर्तन सीधे तापमान नियंत्रण डिजिटल प्रदर्शन पर देखा गया था। प्रशीतन प्रणाली एक दो-चरण के डुप्लेक्स कूलिंग और एक दोहरी पंप स्टार्ट का उपयोग करती है। इसमें एक निरंतर तापमान समय त्वरित कार्य होता है, और जब यह सेट निरंतर तापमान समय तक पहुंचता है, तो एक चरम ध्वनि होगी।
1.2.1.3। फीडिंग डिवाइस और सेंटरिंग डिवाइस
मैन्युअल रूप से क्रायोस्टैट से मानक नमूना निकालें और इसे फीडिंग डिवाइस में डाल दें। डिवाइस क्रैंक-एंड-रॉड मैकेनिज्म को अपनाता है, और नमूना को प्रभावित करने वाले एनविल को भेजने के लिए हैंड्रिल को धक्का देता है। यह स्वचालित रूप से केंद्रित है और उन्हें फीडिंग डिवाइस लेने की आवश्यकता नहीं है। प्रभाव पूरा होने के बाद, फीडिंग डिवाइस और अपशिष्ट पदार्थ को दूसरे नमूने को रखने के लिए प्रतीक्षा करने के लिए प्रारंभिक स्थिति में वापस खींच लिया जाता है। पी -2, पी -3, पी -4 नमूनों के लिए उपयुक्त। सेंटरिंग डिवाइस को एनविल पर लगाया जाता है और नमूने का अंत त्रुटि समायोजन के लिए तैनात किया जाता है।
1.2.1.4। होस्ट सिस्टम
मुख्य मशीन एक ट्रांसमिशन मैकेनिज्म, एक हैमर बॉडी कंपोनेंट, एक लिफ्टिंग मैकेनिज्म, एक हैमर ट्रैकिंग डिवाइस, एक गाइड रेल, बेस का फ्रेम और इस तरह से बना है।
एक। संचरण तंत्र
यह एक जापानी शिमा ब्रांड गियर वाली मोटर से सुसज्जित है और इसमें पावर-ऑफ ब्रेक है। यदि मोटर बंद हो जाती है और हथौड़ा के बढ़ने या गिरने के दौरान अचानक बिजली की विफलता के दौरान संपूर्ण ट्रांसमिशन सिस्टम रुक जाता है, तो यह हथौड़े को फिसलने और दुर्घटना से रोक सकता है।
बी। हथौड़ा भाग
हथौड़ा शरीर कास्ट स्टील के टुकड़े की समग्र संरचना को अपनाता है, कठोरता अच्छी है, पंच और हथौड़ा शरीर संयुक्त हैं, और उच्च गुणवत्ता वाले मिश्र धातु स्टील सामग्री का उपयोग किया जाता है, कठोरता HRC58-62 तक पहुंचती है, और पंच के वक्रता त्रिज्या R25 तक पहुंचती है। हैमर बॉडी का ऊपरी हिस्सा एक हुक सेल्फ-लॉकिंग स्ट्रक्चर के साथ प्रदान किया जाता है।
सी। उठाना तंत्र
स्प्रोकेट चेन ट्रांसमिशन मोड को अपनाते हुए, उठाने की गति 1.1m/मिनट है, धीरे -धीरे लॉक हथौड़ा को कम करना और हथौड़ा उठाना। सीमा नियंत्रण स्विच स्थापित किया गया है और स्वचालित रूप से बंद कर दिया गया है।
डी। हथौड़ा ट्रैकिंग डिवाइस उठाना
हैमर ट्रैकिंग डिवाइस को कम करने के माध्यम से, हथौड़ा शरीर को हथौड़ा शरीर के संपर्क के बाद स्वचालित रूप से बंद कर दिया जाता है, और संयुक्त शरीर को धीरे -धीरे उठाने वाले तंत्र की कार्रवाई के तहत उठाया जाता है। सेट ऊंचाई तक पहुंचने के बाद, सीमा घटक जल्दी से ट्रांसमिशन सिस्टम को घूर्णन से रोकने के लिए एक संकेत प्रसारित करता है और हथौड़ा सेट ऊंचाई पर रुक जाता है। जब प्रभाव कमांड प्राप्त होता है, तो लॉक हैमर डिवाइस जल्दी से हथौड़ा शरीर जारी करता है और गाइड रेल के साथ स्वतंत्र रूप से चलता है। प्रभाव परीक्षण पूरा करें। लॉक हैमर और रिलीज़ मैकेनिज्म में एक सेल्फ-लॉकिंग डिवाइस होता है, और हुक-एंड-ड्रॉप फेनोमेनन अचानक बिजली की विफलता की स्थिति में नहीं होता है। सुरक्षित और विश्वसनीय।
ई। मार्गदर्शक रेल
यह दो × 54 × 12 निर्बाध स्टील ट्यूब और फिर क्रोम-प्लेटेड के साथ एक चिकनी सतह में संसाधित किया जाता है।
एफ। फ्रेम फ्रेम
आधार ZG45 कास्ट स्टील सामग्री से बना है। स्तंभ चार × 83 × 12 निर्बाध स्टील ट्यूबों को अपनाता है, और शीर्ष प्लेट कठोरता और शक्ति आवश्यकताओं को सुनिश्चित करने के लिए मोटी स्टील प्लेट से बना है।
1.2.1.5। विकलांग-विरोधी हड़ताल युक्ति
दो कार्यशील टेबल सतहों को क्रमशः हथौड़ा शरीर लैंडिंग स्थिति के आधार पर रखा गया है, और एक पुश-प्रकार इलेक्ट्रोमैग्नेट लीवर तंत्र को टेबल की सतह पर लगाया जाता है। जब हथौड़ा ब्लेड नमूना को हिट करता है, तो फोटोइलेक्ट्रिक सिग्नल को तुरंत लीवर को धक्का देने के लिए इलेक्ट्रोमैग्नेट में प्रेषित किया जाता है। एंटी-सेकंडरी स्ट्राइक ब्लॉक को हथौड़ा की खाई में धकेलते हुए, जो ऊपर की ओर रिबाउंड करता है, ड्रॉप हैमर को ऊपर उठाता है, और हथौड़ा ब्लेड को दो बार नमूने पर गिरने का कारण नहीं बनता है, प्रभावी रूप से "माध्यमिक" हड़ताल को रोकता है।
1.2.1.6। सुरक्षा सुरक्षा युक्ति
यह 1 मीटर हाई स्टील मेष सुरक्षा उपकरण को अपनाता है और दरवाजा बंद करने के लिए इलेक्ट्रिक कंट्रोल डिवाइस से लैस है। सुरक्षात्मक दरवाजा बंद नहीं है, और ऑपरेटिंग सिस्टम हमेशा बंद रहता है और इसे शुरू नहीं किया जा सकता है।
1.2.1.7। आंकड़ा अधिग्रहण तंत्र
मोटर आउटपुट शाफ्ट को दक्षिण कोरिया से आयातित एक रोटरी एनकोडर के साथ सहवास किया जाता है। इसकी उच्च परिशुद्धता और 0.1O का संकल्प उठाने की स्थिति की सटीकता को सटीक रूप से नियंत्रित कर सकता है।
एक संदेश छोड़ें
आप मुझे ईमेल के माध्यम से भी संपर्क कर सकते हैं। मेरा ई - मेंल पता है info@shhualong.com
अनुशंसित उत्पाद

LWC-300/500/1000/2000 इलेक्ट्रो-हाइड्रोलिक सर्वो तीन-सिलेंडर बेंडिंग परीक्षण मशीन - LWC श्रृंखला

WCJ-20000/50000/100000 पूरी तरह से स्वचालित धातु ड्रॉप वजन प्रभाव परीक्षण मशीन (DWTT) - WCJ श्रृंखला

रोबोटिक पूर्णतः स्वचालित पेंडुलम प्रभाव परीक्षण मशीन - सीबीडी-डीआर श्रृंखला
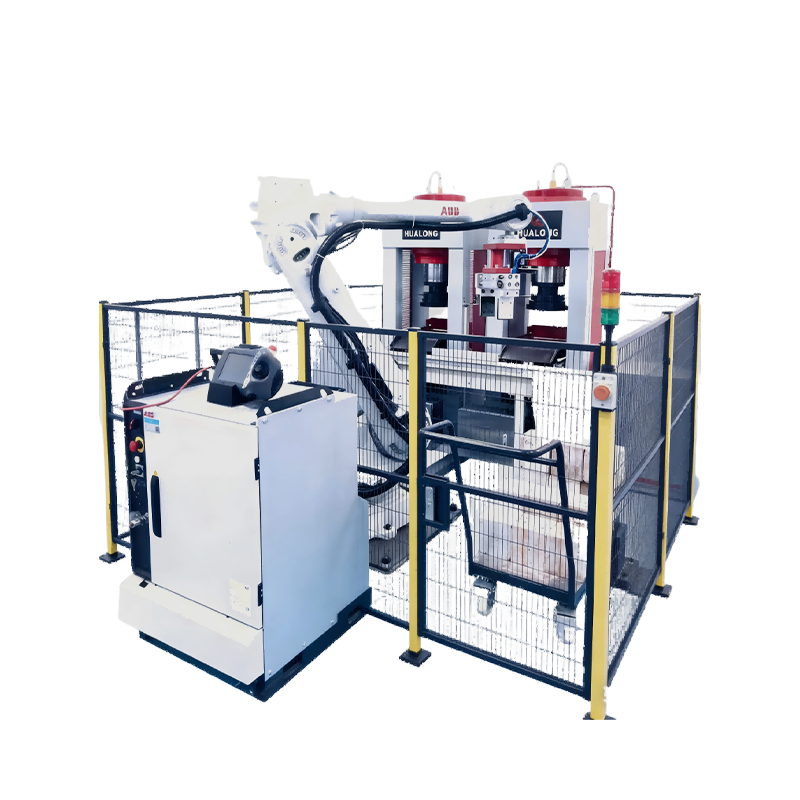
पूरी तरह से स्वचालित रोबोटिक इलाज और संपीड़न शक्ति परीक्षण प्रणाली - WHY-G श्रृंखला
सहायता चाहिए या कोई प्रश्न?
Hualong परीक्षण के माध्यम से आपकी कंपनी के लाभ में मदद करने के बारे में अधिक जानकारी के लिए, कृपया बटन पर क्लिक करें।FRIEND LINK:
हमसे संपर्क करें
नंबर 389 चुनाहोंग रोड, पुडोंग न्यू एरिया, शंघाई 201202, चीन
Tel: +86 17821945087
Online Service: 7*24h






© 2018 HUALONG All rights reserved. SiteMap
